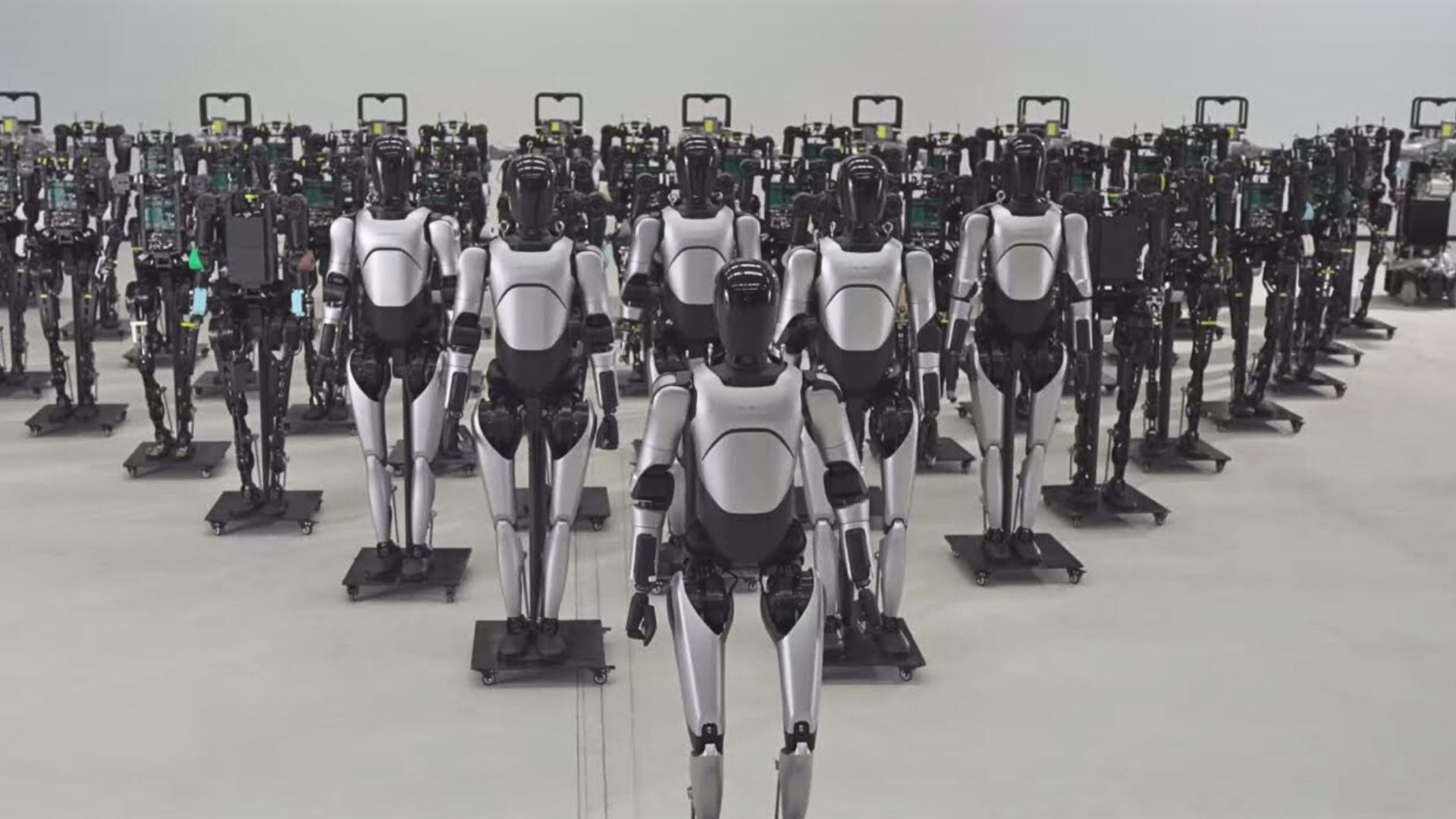
There is a video that every humanoid startup puts out. The robot folds a shirt, or hands someone a coffee, or walks across a factory floor in slow, deliberate steps that look almost natural if you don't know what you're looking at.
The video is real. The robot did those things. What the video doesn't show is the four hours of setup, the three takes that failed, the engineer just off-camera ready to catch a quarter-million-dollar machine if its ankle actuator does the thing it did twice last week. What the video doesn't show is the cost structure underneath the movement, and the six independent problems that have to be solved simultaneously before that movement can happen unsupervised, at scale, for a price anyone would pay.
I've spent a decade as a product manager. The hardest part of the job is telling the difference between a demo and a product. A demo is a promise. A product is a promise that survives contact with reality, at scale, repeatedly, for years. Everything I'm about to describe is the gap between those two things, applied to the most ambitious hardware bet in a generation.
The Math Nobody Wants to Do
In 2025, humanoid robot startups raised $4.3 billion. Figure raised at $39 billion on a few hundred units shipped. Skild raised at $14 billion on $30 million of revenue. China shipped roughly 13,000 units (about 90% of the global total), and the three profitable Chinese players combined still shipped fewer units than a mid-sized Tesla factory produces cars in a week.
Morgan Stanley says this becomes a $5 trillion market by 2050. A billion humanoids. Every factory, every warehouse, eventually every home.
They're right about the destination. They're wrong about the timing by an order of magnitude, and wrong in a specific direction: the platforms being funded in 2026 aren't the ones that win in 2040.
Here's why. Six locks. Each solvable in isolation. Each with a plausible story for how it opens by 2030. Morgan Stanley's forecast requires all six to open simultaneously.
That isn't how infrastructure problems work.

LOCK 1The Software Doesn't Work the Way They Say It Does
What the industry sells is a general-purpose robot that learns tasks like a human does (by watching and being told), powered by a foundation model trained on video and teleoperation data. Physical Intelligence's Pi, Nvidia's GR00T, Google's Gemini Robotics, Figure's Helix, AgiBot's GO-1. All variations on the same bet: a big model plans, a small controller moves, scaling laws do the rest.
This is the Vision-Language-Action paradigm, or VLA. It's borrowed almost wholesale from what worked for LLMs. The assumption is that physical intelligence will yield to the same playbook: scale the model, scale the data, emergent capabilities appear, the curve bends in your favor.
The assumption is probably wrong. Not because foundation models don't matter; they do, there's real progress. It's wrong because the problem is shaped differently than language, and the specific ways it differs are the ways that defeat scaling.
The entire AI boom (the one that has already produced the largest capital misallocation in venture history) is built on a single structural insight: software cost structures collapsed, and everything changed. The spec moved to the end. The prototype became the first draft. Build cycles compressed from months to hours. This is real, and it's transformative, and it works because software's fundamental inputs (data, compute, iteration) all got cheaper at the same time.
Humanoid robotics has none of that. The industry is running the LLM playbook at a data collection rate roughly a billion times slower, on a problem where the cost structure hasn't collapsed and isn't going to.
The data problem has four dimensions, none solved. LLMs got lucky: the internet was a massive, diverse, free training corpus that billions of humans produced by accident. Robotics has no equivalent. Teleoperation costs $30 to $50 an hour, produces data at human speed, and doesn't scale past a few thousand hours per company. YouTube video is plentiful but missing proprioception, tactile data, and action labels. Simulation is free and infinite but has a sim-to-real gap that widens exactly on the contact-rich tasks humanoids are supposed to do. Cross-embodiment transfer (train on one robot, deploy on another) is still mostly unsolved, despite being the load-bearing assumption of every major VLA effort.
Bulls say data is solvable. Deploy more robots, collect more data, bootstrap the flywheel. This is the same argument Tesla has made about FSD since 2019. Tesla has more driving data than any company in history, and FSD still can't be trusted unsupervised after a decade. Manipulation data is orders of magnitude harder to collect, and no humanoid company has a fleet at meaningful scale. The flywheel hasn't started turning.
The action space is continuous, not discrete. LLMs predict one token from a finite vocabulary. Motion is continuous across dozens of degrees of freedom at 100-200 Hz, with dynamic coupling where a small error at the shoulder propagates through the elbow and wrist to the fingertip. Every current VLA handles this with a compromise at the action head (flow matching, diffusion, action chunking), and none are anywhere near LLM-level reliability. The field's headline benchmark for this is called LIBERO: a fixed set of manipulation tasks (pick, place, stack) that run inside a physics simulator. Unitree topped it at 98.7% in January 2026, the best published score. It sounds impressive until you notice what's missing: no VLA has come anywhere near that number on the same tasks in the physical world. Simulated objects behave. Physical ones don't.
Feedback is slow and expensive. LLMs train on next-token prediction at microsecond speeds with effectively infinite examples. Physical robots get feedback at the speed of physical execution: seconds to minutes per trial, hardware wearing out, safety constraints preventing aggressive exploration. RL in simulation is fast but transfers poorly for contact-rich cases.
Failures are asymmetric. An LLM that hallucinates a citation is embarrassing. A humanoid that hallucinates how a coffee mug is weighted drops the mug. A humanoid that hallucinates the position of a child's foot steps on it. A VLA that works 95% of the time is deployable as a chatbot. A humanoid that works 95% of the time injures someone every twenty tasks. The bar isn't 95%. It's six nines on safety-critical actions. No VLA is close.
Long-horizon planning is unsolved. Current VLAs work for 10-30 second tasks. Physical Intelligence's Pi 0.6 claimed a 10-minute horizon in February 2026 as a headline result. Folding laundry takes a human 15 minutes. A factory shift is 8 hours. The gap between what VLAs can do and what humanoids are sold as doing is one to two orders of magnitude.
Errors compound. Driving is forgiving in a specific way: the road tomorrow looks like the road today, regardless of how you drove yesterday. Manipulation is the opposite. Every action changes the scene. Pick up the cup, the counter is different. Place the cup, the cupboard is different. The system has to make each decision well and recover when earlier decisions went subtly wrong in ways it can't directly observe.
Now compare to driving, the easier problem. Driving had a single dataset type produced at scale for free. A three-dimensional action space in a world designed to be legible. A clean reliability target. A narrow set of failure modes. Waymo took 16 years and $45 billion to reach geofenced operation in four cities. Cruise died. Argo died. FSD is still supervised after a decade.
When Rodney Brooks (founder of iRobot and Rethink, former head of MIT's AI Lab) says VLAs are architecturally incomplete for contact-rich work because humans have 17,000 tactile receptors and there's no Common Crawl for touch, he's not being a curmudgeon. When Yann LeCun says friction is too hard to simulate and autoregressive models have no path to physical reasoning, he's not hedging. The people who built this field are telling us the field's core approach is wrong. The fundraising decks aren't mentioning it.
Manipulation is harder than driving by at least an order of magnitude. The industry says it ships at scale by 2028.

LOCK 2Nobody Actually Needs a Robot with Legs
The commercial deployments that actually make money are wheeled. Galbot's mobile manipulators run unmanned pharmacies in 30+ Chinese cities. Hexagon's AEON is on the BMW Leipzig line. Agility's Digit is technically bipedal but in GXO warehouses it's basically a wheeled replacement with legs as a last-mile curiosity. The most commercially successful Chinese humanoid per dollar invested is Galbot, which went wheeled from day one.
Bipedal exists because investors can picture it. It matches the demo video. It justifies the comparison to human labor. It lets the founder say "general purpose" with a straight face.
The industry knows. AgiBot's X2-N transforms between bipedal and wheeled. XPeng's CEO He Xiaopeng, asked directly whether Iron would go to factories or homes, said no: the near-term use cases are reception, shopping guide, patrol. He didn't mean 2026. He meant ever, at current economics.
Then there's the energy tax on walking upright, and this is where it becomes Newton, not software.
A standing bipedal humanoid draws 300-500 watts just holding itself up. Ankle, knee, and hip actuators fire continuously against gravity. Add walking, it's 500-800W. Add manipulation, it's over a kilowatt. Figure 02's 2.25 kWh battery gets you 2-3 hours of real work. A wheeled mobile manipulator at idle draws near zero (wheels don't consume energy to stand still), so the entire battery goes to doing work instead of not-falling-over. Same battery, 2-4x the useful runtime.
A human factory worker runs 8 hours with a 30-minute break. Matching that with a bipedal humanoid means either two robots rotating through a charging cycle or accepting multi-hour downtime. Figure's 03 has inductive foot-charging, a tell. The robot has to periodically park itself on a charging pad because continuous operation isn't achievable. UBTECH's Walker S2 uses hot-swappable batteries, a 3-minute exchange, which keeps it working but requires charging stations, battery inventory, and technicians. Add it to the TCO.
At facility scale, the numbers get embarrassing. A thousand bipedal humanoids running continuously pull about a megawatt. Morgan Stanley's billion-unit forecast implies roughly a terawatt of continuous humanoid charging draw, comparable to global EV charging demand, for a technology doing a fraction of the economic work. Grid implications of humanoid bull-case scale are rarely discussed and never modeled.
Bipedal is strictly harder to balance, power, and manipulate with than wheels-plus-arms. It's also strictly worse at the tasks anyone is currently paying for. The capital going into bipedal-specific R&D isn't building toward the 2030 commercial reality. It's building toward the 2030 demo reel.

LOCK 3The Swiss Choke Point Nobody is Pricing
Here's where the argument becomes unanswerable, because it's no longer about AI.
When a humanoid bends its knee, something has to push the joint open or closed with tremendous force. That something is a planetary roller screw, a precision component most people have never heard of, and the one on which the entire humanoid industry quietly depends.
A roller screw looks like a fat threaded rod with a nut around it, except instead of threads sliding against threads, a ring of small cylindrical rollers spirals around the shaft. Load gets distributed across dozens of contact points. A humanoid joint starts, stops, and reverses thousands of times per hour under heavy load. A cheap alternative (a ball screw) costs $50 and wears out in weeks under humanoid duty cycles. A planetary roller screw costs $1,350 to $2,700 and lasts years. There's no meaningful middle option.
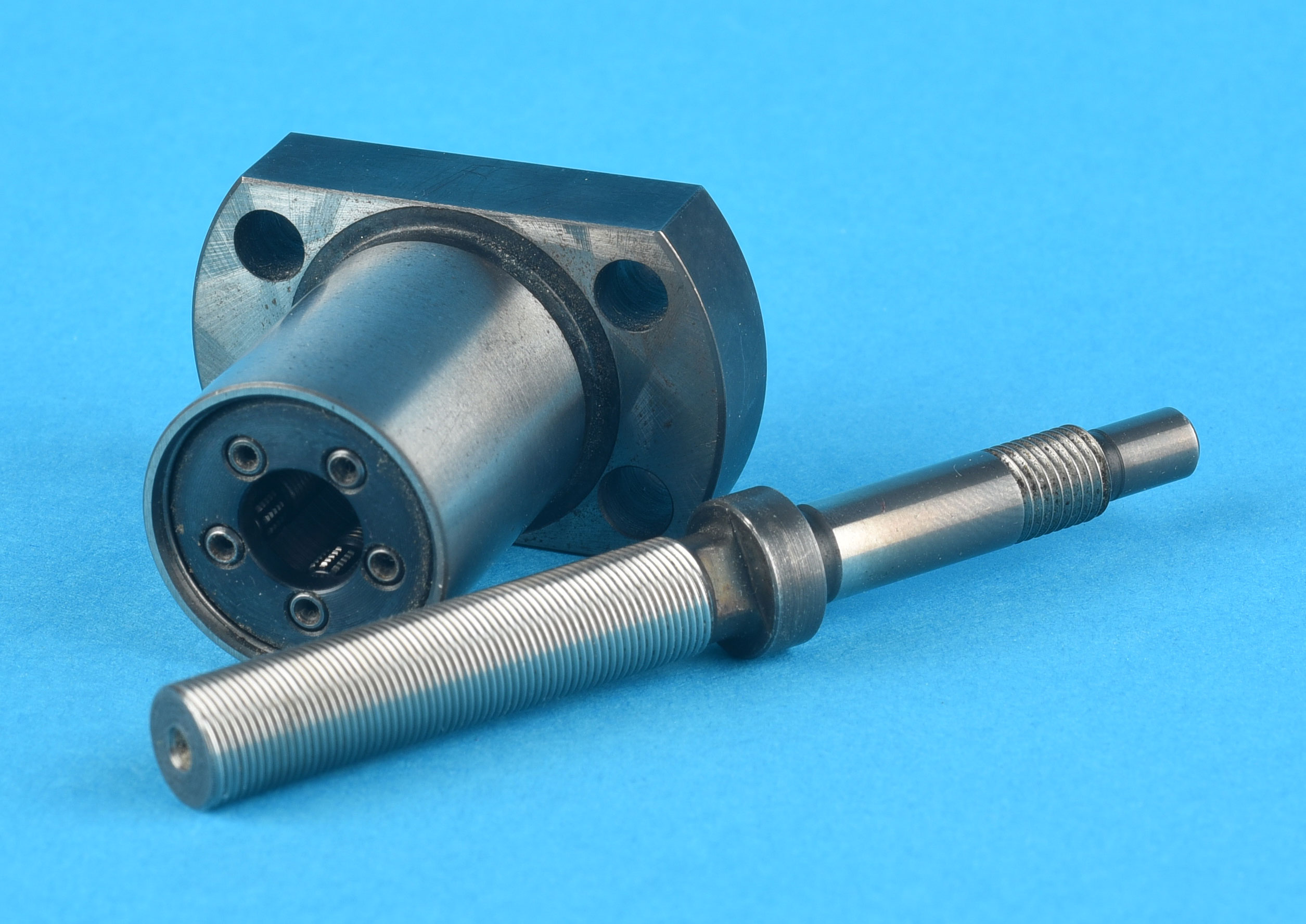
A single humanoid contains about forty of them.
Now the precision problem. The industry standard is C3: accuracy of three micrometers over 300 millimeters. Three micrometers is the width of a red blood cell. Three hundred millimeters is the length of a dinner plate. A C3 roller screw stays accurate to one red blood cell across a dinner plate, thousands of times per hour, for years. If your knee actuator is off by even ten micrometers each step, errors compound, balance fails, the robot falls.
Making a C3 roller screw is hard in a way that doesn't yield to throwing money at it. The rollers and the shaft have to be ground and heat-treated on machine tools that themselves took decades to perfect. The workforce that operates them is measured in hundreds of people globally, most in Switzerland. Rollvis has been making them since 1970. GSA since 1978. Together with Schaeffler's Swedish subsidiary Ewellix, three firms hold about two-thirds of the world's C3-grade capacity. Chinese competitors Shuanglin and Changban are scaling fast on price but haven't closed the precision gap; the expertise is a multi-decade investment, not a capex line.
Combined global C3 capacity across all industrial uses is in the low hundreds of thousands per year.
Morgan Stanley's billion-humanoid bull case requires forty billion roller screws. At current capacity, producing that volume would take thousands of years.
The supply curve doesn't bend. It breaks.
Harmonic reducers follow the same structure; Harmonic Drive Systems in Japan is the incumbent, and Morgan Stanley's own analysts forecast HDS's humanoid revenue share shrinking from 35% to 6% as Chinese competitors undercut on price. Either Western humanoids depend on Japanese capacity that can't scale fast enough, or they depend on Chinese capacity that's geopolitically gated.

Rare earth magnets close the loop. Every humanoid actuator needs neodymium-iron-boron magnets with dysprosium or terbium additions. China controls about 60% of mining, 70% of refining, and 90% of finished magnet production. Its April 2025 export controls specifically restricted the chemistries humanoid motors need. MP Materials and Noveon, the US alternatives, aren't at meaningful scale until 2028 at earliest.
So Western humanoid BOMs pass through three bottlenecks: Swiss roller screws, Japanese reducers, Chinese magnets. At least one is actively weaponized as of this writing.
The CHIPS Act spent $52 billion on a problem (semiconductors) that had scaling physics on its side. Building non-Chinese magnet capacity and non-Swiss roller-screw capacity to support Morgan Stanley's forecast would need a CHIPS-sized industrial commitment. Nobody is debating it. It's not in any administration's policy pipeline. It doesn't exist.
The AI problem is solvable with capital. The supply chain problem is solvable with a decade of capital expenditure nobody is making.
LOCK 4The Robots Are Breaking
Figure's retirement post for Figure 02 is the cleanest case study in the industry, because the company wrote it themselves.
Eleven months at BMW Spartanburg. 1,250 operating hours across the fleet. Contribution to 30,000 X3 vehicles. About two robots deployed. Forearms failing at end of life. The robots came off the line, in their words, "bruised."
Quick math: 1,250 hours across 30,000 cars is 2.5 minutes per car, maximum. Figure 02 did one narrow repetitive task. Not "general-purpose manufacturing work." And at 1,250 hours the wrists were already going.
A human factory worker does 2,000 hours a year and doesn't need forearm replacement.
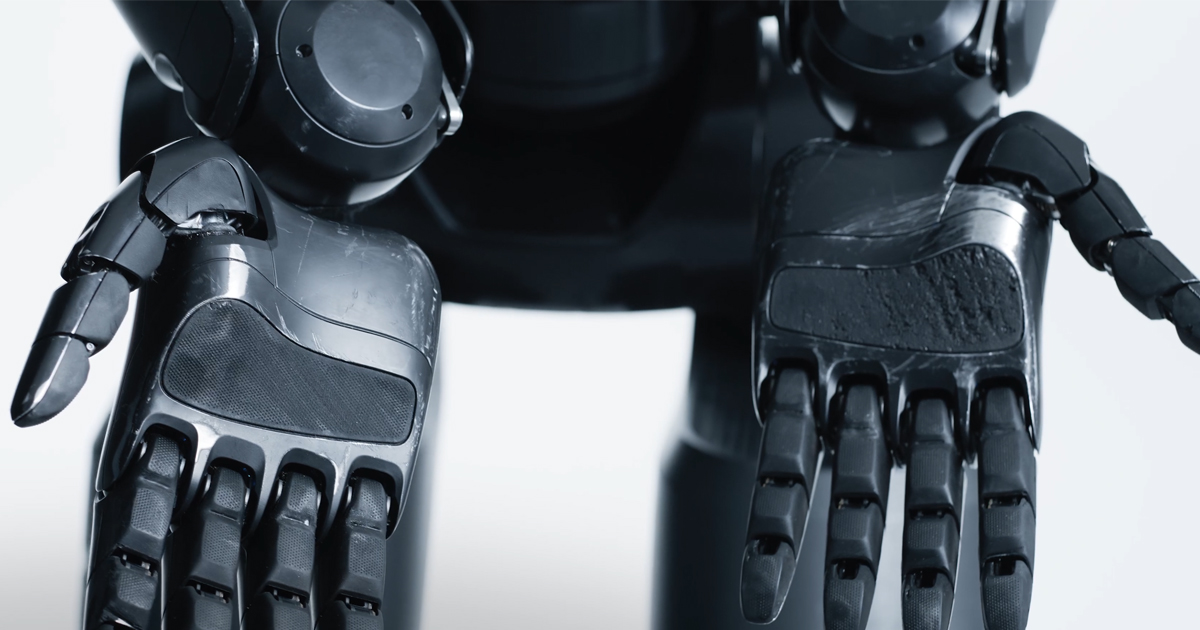
The MTBF gap between humanoids and human labor on the subsystems that matter is currently an order of magnitude in the wrong direction. And the worst subsystem is the one that justifies the entire form factor: the hand.
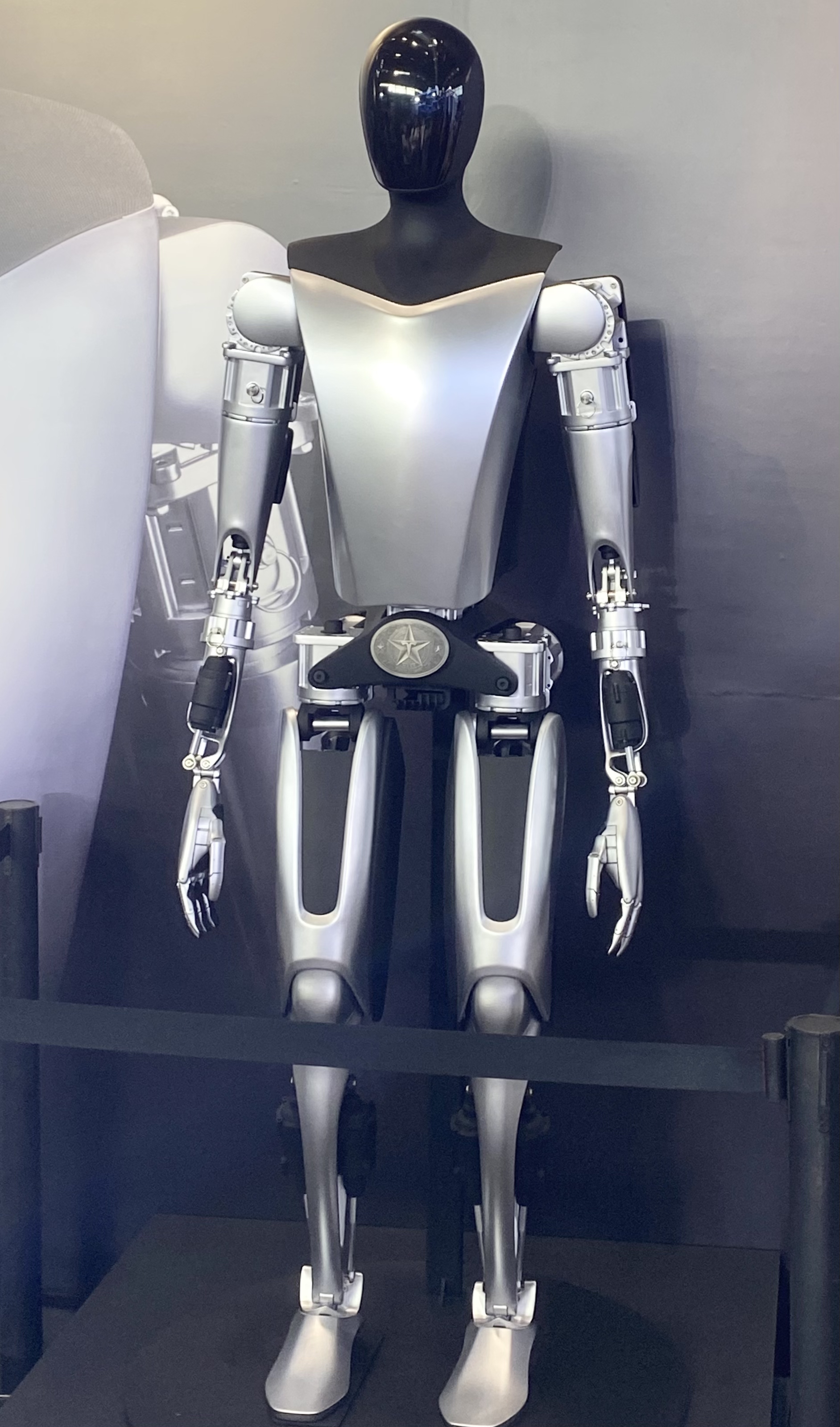
Tesla redesigned the Gen 3 hand entirely (22 DoF, 50 actuators per hand, tendon-driven) because Gen 2's hand couldn't survive real work. A 22-DoF hand has hundreds of failure points per unit. If the hand has a 500-hour MTBF against a human's effectively infinite MTBF, the economics collapse regardless of how good the software gets.
No humanoid maker has published Overall Equipment Effectiveness for a commercial deployment. Traditional industrial arms hit 85-95% OEE because they're purpose-built for one task with deterministic motion paths. Humanoids are sold as general-purpose: variable loads on every joint, non-deterministic wear, unpredictable failure modes. The numbers would be embarrassing. So the numbers don't get released.
Agility's 100,000-tote milestone at GXO is impressive precisely because it's the only humanoid deployment where uptime is even implied. GXO won't disclose actual availability. Nobody will.
The data that would prove me wrong is exactly the data the industry refuses to publish.
There's a well-known finding from social media research: the content users engaged with most (clicked more, scrolled longer, watched to the end) was often the same content they reported made them feel worse when asked. Engagement and satisfaction were measuring opposite things, and every platform chose to believe the engagement number. The humanoid industry has the same structure. The metric the investors watch is valuation and units-in-pitch-deck. The metric that would tell the truth is OEE and field failure rates. The industry chose the engagement number. The satisfaction number doesn't get published because it would end the conversation.
LOCK 5Nobody Has Built the Service Network
Industrial robotics has a 40-year rule: total cost of ownership over a decade is 3-5x purchase price, dominated by maintenance, parts, and downtime.
At $30,000 acquisition, that implies $90,000 to $150,000 lifetime. Against fully-loaded human labor at $40,000 a year, the payback math requires the robot to beat a human across three shifts, seven days, with 95%+ availability, for ten years.
No current humanoid is within an order of magnitude of that envelope.
A 10,000-unit deployment across 500 sites needs a parts and field-service infrastructure that ABB, Fanuc, and Kuka spent 40 years building. Figure doesn't have it. Apptronik doesn't. 1X doesn't. Tesla has a service network for cars; Optimus is different enough that the overlap is modest.
Bulls say costs fall with scale. BOM compression is real: Unitree dropped the R1 to $4,900 in 2026, Goldman documented a 40% BOM decline across 2023-2024. But cheaper hardware doesn't solve maintainability. It makes it worse. A $5,000 robot that fails at 500 hours still needs a technician, still needs parts, still needs downtime accounting. At that price the TCO math implies you throw it away instead of servicing it. Nobody in enterprise sales is buying a disposable factory worker.
LOCK 6The Regulators Haven't Even Shown Up
ISO 25785-1, the first international safety standard drafted for humanoid-class machines, was published in draft form in May 2025. The working group deliberately avoided the word "humanoid." The standard is titled "industrial mobile robots with actively controlled stability."
ISO adoption takes 3-5 years. Factory integrators won't deploy at scale until a published standard exists. Insurers won't write policies until then. OSHA has no humanoid framework. The EU AI Act classifies humanoids as high-risk machinery safety components, with obligations from August 2026 through 2027.
Liability precedent doesn't exist because the test cases haven't happened yet. They will. Figure's former head of product safety filed suit in November 2025 alleging the robots were powerful enough to fracture a human skull. Whether the claim survives litigation, it's the first humanoid whistleblower filing in the industry. There will be more. Every one makes insurance and regulatory timelines longer, not shorter.
The Dependency Graph Has Cycles in It
Each lock is solvable in isolation. Each has a plausible story.
Morgan Stanley's forecast requires all six to open simultaneously. That isn't how infrastructure problems work.
The cognition lock opens when a tactile-data corpus exists, which requires a decade of field deployment generating that data, but field deployment requires the reliability lock to open first. The actuator lock opens when non-Chinese capacity scales, which requires CHIPS-sized capex that isn't being allocated. The reliability lock opens when hands survive 10,000 hours of varied load, which the current actuator supply chain can't support at scale. The regulation lock opens when insurers have loss data, which requires deployments that can't happen until the reliability lock opens.
These aren't independent bets. They're a sequential dependency graph with cycles in it.
The historical base rate for this kind of multi-factor infrastructure transition is 20 to 40 years. EVs took 25 years from the 1996 EV1 to Model 3 mass production. Commercial aviation took 30 years from Wright Flyer to DC-3. Autonomous driving is 20 years in and still geofenced.
Humanoids aren't on a faster curve. They're on a slower one, because the problem is harder.
The Pincer, Again
The geometry that killed the AI startup wave was a narrow strip of market territory: model companies absorbing features from above, incumbent platforms bolting AI onto installed bases from below. Call it the Pincer. Being good is what attracts the pincer. A well-packaged capability is a well-marked target.
Western humanoid startups face their own pincer, and it's worse.
From above: fundamental physics, supply chain constraints, and regulatory timelines that no amount of capital accelerates. These aren't competitors. They're ceilings. You can't ship faster than the ISO committee publishes. You can't build more roller screws than Switzerland can grind. You can't collect tactile data faster than the speed of human hands.
From below: Chinese state-subsidized production with 5x the unit volume, captive rare earth supply, government-backed factory integration, and labor costs that make the Western BOM look absurd. AgiBot, Unitree, UBTECH, and Galbot aren't competing on Silicon Valley's terms. They're competing on Shenzhen's, with the backing of a state that has decided humanoid robotics is a strategic industry the way it decided solar panels and EVs were strategic industries a decade ago. We know how that played out.
Figure, 1X, and Apptronik are the mice on the counter. The cats are Newton's laws on one side and Shenzhen on the other.
The AI startup pincer ate companies whose products could be replicated in a blog post. The humanoid pincer eats companies whose products can't survive physics on one side and Chinese industrial policy on the other.

Figure is a Wework with a Whistleblower
At $39 billion post-money on a few hundred units shipped and implied revenue in the low single-digit millions, Figure trades at a revenue multiple north of 10,000x. That isn't a venture round. That's a category option masquerading as an equity investment.
The company retired Figure 02 after 11 months at BMW with about two robots contributing to 30,000 cars at 2.5 minutes of work per vehicle, a single narrow task that ended with the robots "bruised" and forearms failing. The CEO publicly overstated the BMW deployment in a way BMW's own spokesperson walked back to Fortune. The former head of product safety filed suit alleging the safety roadmap shown to Series C investors was gutted the month the $1 billion round closed, and that the robots could generate force sufficient to fracture a human skull.
None of this makes Figure a Theranos. There are real robots, real engineers, real progress. What it makes Figure is a WeWork with a whistleblower: a legitimate company extended to a valuation that encodes a timeline that isn't arriving, marketed with a reality distortion field that has started producing legal exposure.
The more honest comparison is Archer Aviation: years of demo reels, celebrity cap-table, strategic partnerships that functioned as marketing, and a commercial path that kept receding as reliability and regulatory reality caught up with the pitch deck. Figure is unlikely to ever produce meaningful revenue on the timeline its valuation requires. Profits aren't in the conversation. The probable endgame is messy execution failure where the 2025-2026 capital gets written down 70-90% and the IP gets absorbed by a strategic acquirer with patient capital and real industrial infrastructure.
Tesla is the Only Real Shot, and It's Already Priced in
Tesla is the only Western company with the industrial base, vertical integration, battery expertise, motor-manufacturing depth, and balance sheet to make a serious run at humanoids at scale. If anyone in the West gets there, it's Tesla. The rest of the field is competing for scraps of a market Tesla will dominate if it executes.
The problem is Tesla's stock already prices that outcome in.
Tesla trades at roughly 100x auto earnings. No automaker trades at that multiple on vehicles alone, and Tesla's auto business isn't growing into the multiple; it's shrinking. Q1 2026 deliveries missed. Chinese market share continues to erode against BYD, Xiaomi, XPeng, NIO. Model S and Model X get discontinued at Fremont in May 2026, with the line converting to Optimus production, a tacit admission that the core car business no longer justifies the factory footprint.
The multiple rests on three future bets: FSD/robotaxi, Optimus, Energy. FSD is a decade late. Energy is real but can't carry the multiple alone. Which leaves Optimus doing the work of justifying the entire gap between Tesla's fundamentals and its price.
On the April 2026 earnings call, Musk declined to give any 2026 Optimus production target, called output "quite slow" and "literally impossible to predict," and pushed the Gen 3 reveal from Q1 2026 to late July or August. The Q4 2025 admission that Optimus is "still very much in the R&D phase" and "not doing useful work" contradicted his January 2025 guidance of 10,000 units in 2025. Actual number was a few hundred. Public sale slipped to end of 2027.
Tesla is the only name that deserves any long humanoid exposure at all. It's also already priced as if success is guaranteed at scale. The asymmetry is backwards. Upside is capped by the multiple. Downside is an industrial and manufacturing reset the company hasn't even started.
Decades, not years.
The Silence is the Scandal
The thing that makes this cycle different is that the investors know.
Nvidia, Alphabet, SoftBank, Tencent, Alibaba: these aren't retail buyers caught up in a mania. They're strategic capital with time horizons that accommodate two decades of option value.
Which means the valuations aren't claims about Figure or Apptronik specifically. They're claims about category exposure. A $39 billion position in Figure is a $39 billion option on the humanoid category being worth $5 trillion by 2050, times the probability that Figure happens to be the winner, times the probability it doesn't get acquired, liquidated, or diluted before then.
Math out the expected value and the position is rational. Math out the implied probability that Figure is the category winner and the position is absurd. The investors are playing for structural exposure to a category that will be real in 2040. The press releases talk about 2026.
This is the engagement-vs-satisfaction problem from social media, transplanted into venture capital. The algorithm couldn't tell the difference between what users clicked and what users wanted, and the platforms chose to believe the metric that made the dashboard go up.
The humanoid investment cycle has the same architecture. The capital is "engaging" (deploying, marking up, press-releasing) with a timeline it doesn't believe. The LPs see the deployment. The founders see the press release. The analysts see the Morgan Stanley forecast. What nobody sees is the private conviction of the strategic investors who know perfectly well that 2028 isn't real and 2032 probably isn't either, but whose incentive structure rewards category positioning over honest communication.
Not fraud. Not mania. Capital that understands the problem correctly and communicates it dishonestly to everyone else, because honest communication would lower the returns.
Two Generations of Losers
The decade-out view isn't a prediction that humanoid robots fail. They won't. By 2040 there will be real humanoids doing real work, and the Chinese industrial base will likely own the supply chain for them.
The decade-out view is that the current capital stack is mispriced by an order of magnitude on timing, and the winners aren't in the room yet.
Every foundational technology funds two generations of losers before the third ships.
Autonomous driving funded Cruise and Argo before Waymo. Personal computing funded Xerox Alto and Apple Lisa before the IBM PC. EVs funded Fisker and Aptera before Tesla. The AI application layer funded Jasper and Inflection and Character.AI before the survivors emerged, and most of those survivors weren't the companies anyone was watching.
Humanoids will fund Figure and 1X and half a dozen Chinese casualties before a 2035-era company nobody has heard of yet reaches unsupervised general-purpose deployment.
The winning platforms in 2040 aren't the platforms being funded in 2026, because the platforms being funded in 2026 will run out of runway before the locks open. The survivors will be the ones with patient capital (Boston Dynamics inside Hyundai, Agility with its GXO revenue, the Chinese state-subsidized trio), and the winners will be companies that don't exist yet, founded in 2029 or 2032, built on infrastructure created by this generation's failures.
This is the normal pattern. It's also the one that never makes it into the pitch deck, because no founder raises a Series B by saying "we are the necessary precursor to the company that will actually succeed."
Six locks. Six keys. Two of the keys don't exist yet.
The robots are coming. Just not when the pitch decks say they are.